
By: Jaclyn Pittman
Hi! My name is Jaclyn Pittman and I’m a PhD candidate in the Earth Sciences PhD program at USC. I work with Professor Will Berelson on exploring the seafloor, the deepest part of the ocean.
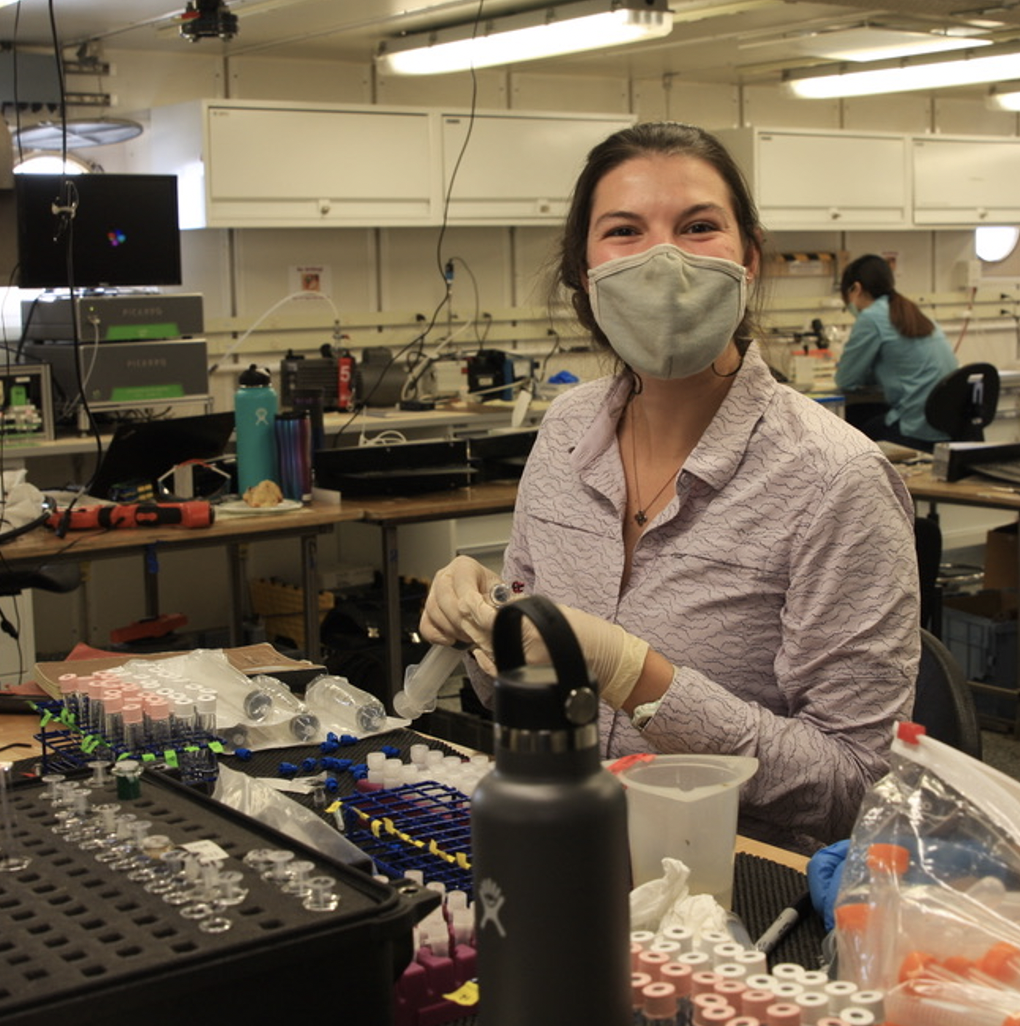
Science at sea, Covid-style.
I study calcium carbonate, the mineral that makes up shells, corals, and plankton that grow in the surface ocean. When those organisms die, their shells sink to the seafloor where they dissolve, a reaction that absorbs carbon dioxide, a critical greenhouse gas. When these empty shells dissolve and absorb carbon dioxide, it will eventually lower atmospheric carbon dioxide.However, when living shells dissolve in the surface ocean, our ocean suffers a loss in biodiversity. This process is called ocean acidification.
As we continue to burn fossil fuels by driving gas cars, using plastic products, and many other daily activities, we emit carbon dioxide into the atmosphere. About one third of the carbon dioxide we have emitted is absorbed by the ocean. This reduces some of the negative impacts of high greenhouse gases on land, but has dire consequences for ocean life. Shell-forming organisms are already feeling the effects of ocean acidification with their weaker and thinner shells.
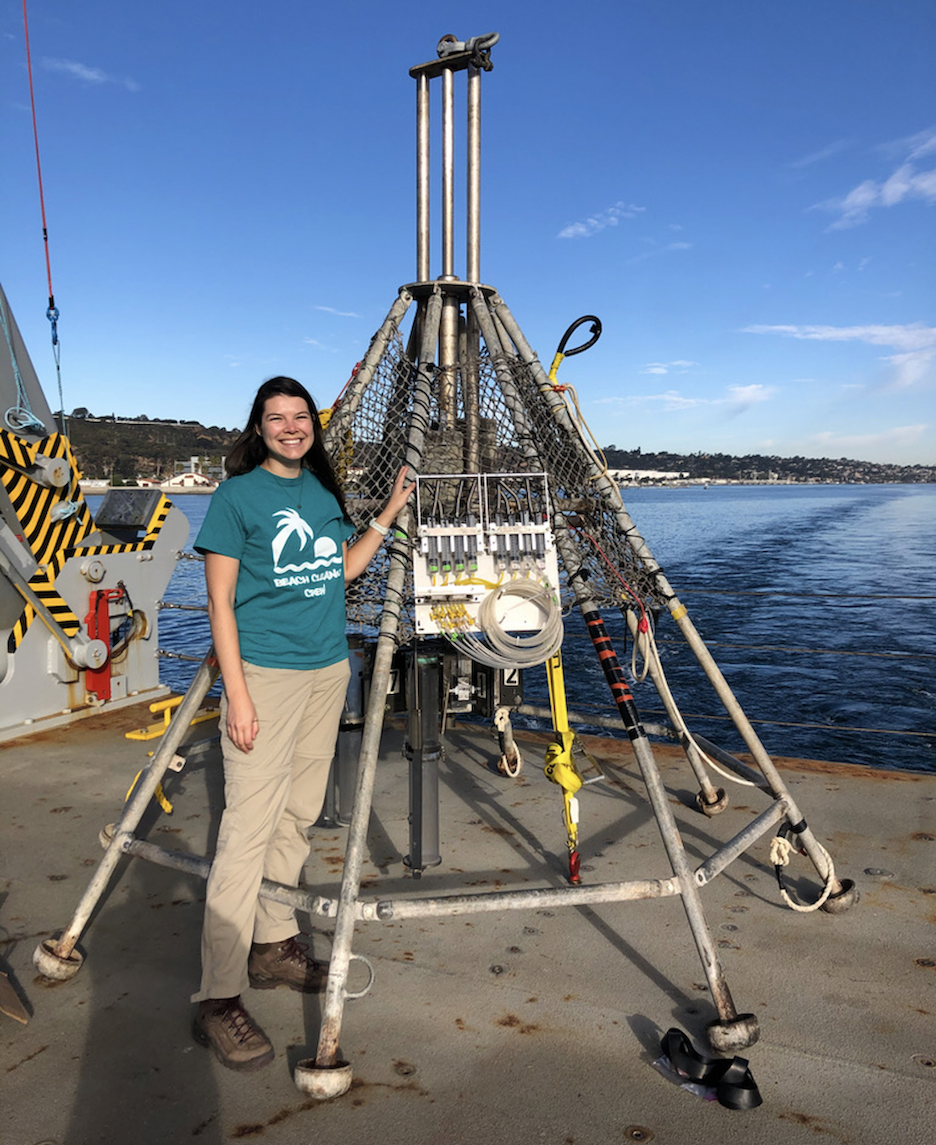
Months of work prepared me to deploy our device on a research cruise off San Diego. The main goal of my research is to find out why, where, and how fast carbonate shells dissolve on the seafloor. Our group has a research cruise planned for this coming winter off Costa Rica, to “walk” down an underwater ridge. By “walking” down the ridge, we can see how carbonate dissolves at different ocean depths. We hypothesize that the deeper we go, the faster carbonate will dissolve. However, there may be certain chemical reactions that happen in the porewater, the water in mud, that can make carbonate dissolve in shallower water than we predict.
In order to achieve these research goals, I have spent much of my PhD building a device to collect the porewater I need to study. Most deep-sea porewater studies rely on pulling porewater from sediment cores, or tubes of mud collected from the seafloor. However, there are some issues with that method that can interfere with carbonate chemistry measurements.
To fix these issues, we have built a device that sucks porewater out of the mud while it is still on the seafloor. We have gone on lots of one-day test cruises in the San Pedro basin, in between Los Angeles and the Wrigley Marine Science Center on Catalina Island. This is all in preparation for our big cruise off Costa Rica this winter, so I need to make sure my device is working perfectly before then.
I was pretty busy this summer. I passed my qualifying exam, a major step in getting a PhD, finished analyzing cruise data, and modified my device for our big cruise this winter. It requires designing parts in AutoCAD, sending designs to the campus machine shop for manufacture, testing in the lab, and finally testing in the field. This whole process is iterative, meaning we usually need to do it multiple times before getting to the desired end product. It’s a fun process though, and I really enjoy building a device to answer my scientific questions.

On our last Yellowfin cruise in between Los Angeles and Catalina, we had some down time while our device was sucking porewater from the mud far below, so the crew taught me how to fish.
I’m so thankful that Wrigley has given me this opportunity to work with them for the summer, and especially the Sonosky family for supporting my research. I hope my research will help the scientific community and the public understand more about how the bottom of the ocean is responding to a changing planet.


